
Aquatic mobile robots are garnering increasing interest for their potential to transform the landscape of tethered nodes within the Ocean Internet of Things and to revolutionize methods of monitoring and exploring marine environments.
Achieving self-sustainability for these untethered robots, especially in inaccessible and remote areas, poses a significant challenge, with energy autonomy being the foremost obstacle.
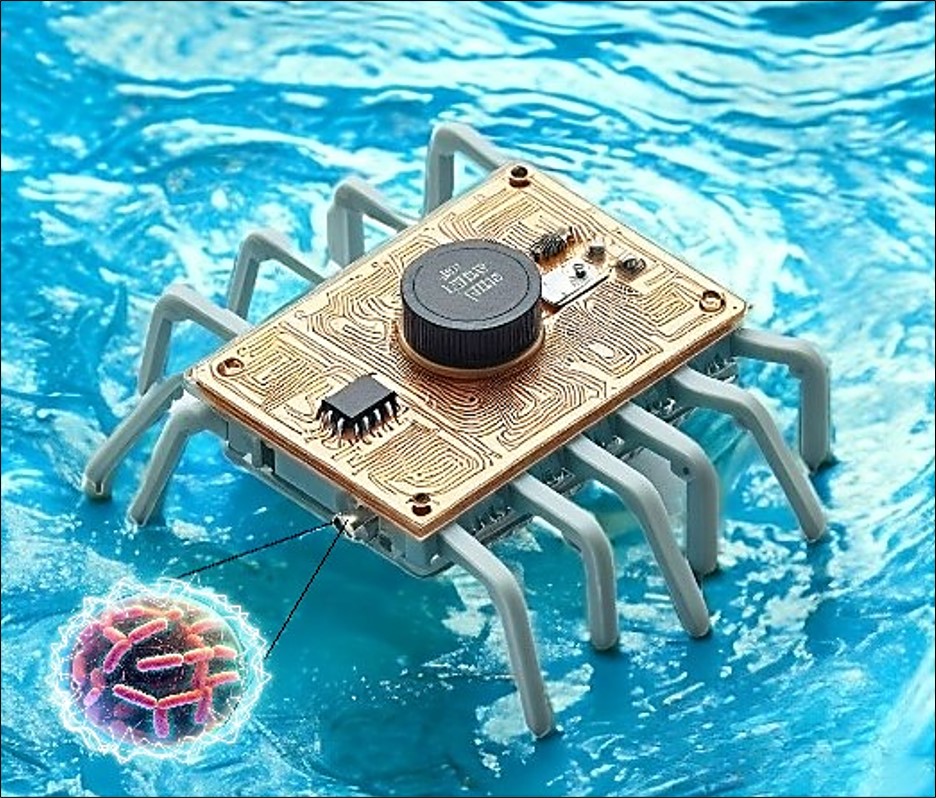
This work unveils an innovative self-sustaining energy system for compact aquatic robots, drawing inspiration from the natural process of biological digestion. By metabolizing organic materials found in aquatic settings, microbial fuel cell (MFC) technology transforms organic matter into electricity via catalytic reduction-oxidation reactions.
To enhance the MFC's longevity, this study employs spore-forming Bacillus subtilis as the anodic biocatalyst. This choice exploits the bacterium's capability to endure harsh conditions by entering a dormant state and reactivating under favorable conditions, thereby prolonging the operational life of the MFC.
To ensure a continuous and dependable provision of organic substrates essential for microbial viability, this research integrates a biomimetic Janus membrane characterized by asymmetric surface wettability, facilitating selective intake from the substrate. Moreover, incorporating stability mechanisms inspired by the water strider enables the aquatic robot to move efficiently across water surfaces.
The robot mimics the water strider's graceful movement using a motor powered by microbial metabolism, fueled by the organic nutrients in the aquatic environment via the Janus membrane. This study demonstrates the feasibility of using natural processes for technological advancement and sets new benchmarks in the design of autonomous systems.
← Back to Research